Accurate, reliable and continuous position information is essential for dynamic positioning. Some DP operations require better than 3m relative accuracy. A DP control system requires data at a rate of once per second to achieve high accuracy. Reliability is, of course, of vital importance, to operations where life and property may be put at extreme risk through incorrect position data.
All DP vessels have position reference systems (PRS), (sometimes referred to as position monitoring equipment or PME), independent of the vessel’s normal navigation suite. Five types of PRS are in common use in DP vessels; Hydroacoustic Position Reference (HPR), Taut Wire, DGPS, Laser-based systems (Fanbeam and CyScan) and Artemis. A brief description will be given of each.
DP control systems ‘pool’, or combine, position reference data from two or more position reference systems. If only one position reference system is enabled into the DP then it is simply checked, filtered and used. If two or more are available, then the system needs to use both equally or according to their individual performance.
In all modern DP systems the weighted average option can be selected, whereby individual position references are weighted in inverse proportion to the variance or ‘spread’ of position data; the higher the weighting for an individual position reference system, the greater the influence of that system in the position calculation.
Early DP control systems did not have the capability to learn from the past performance other than by the integral terms of the controller. Modern systems are able to improve station keeping performance by using a Karman filter, which provides a model of recent performance to improve present performance.
For any operations requiring DP redundancy (equipment Class 2 or 3 operations) it is necessary to utilise three position references. Two PRSs are not adequate, because if one has failed, contradictory reference data provides an impass, whereas three systems provide two-out-of-three voting to identify a rogue sensor.
Where three PRSs are required, the DPO should choose systems that are different. This reduces the probability of common-mode failure, where one event may result in a loss of position.
A brief description will be given of the five commonly used position reference systems.
4.2 – Hydroacoustic Position Reference (HPR)
Underwater acoustics have many applications, one of which is the provision of position reference for DP purposes13.
Acoustic positioning is also used for tracking of underwater vehicles or equipment, the marking of underwater features or hardware and the control of subsea equipment by means of acoustic telemetry.
There are three types of acoustic position reference systems in common use – ultra- or super-short baseline systems (USBL or SSBL), short baseline systems (SBL) and long baseline systems (LBL). Each has advantages and disadvantages which determine when and how each is used.
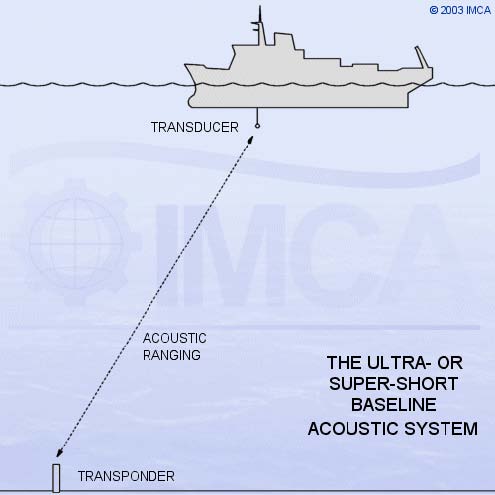
4.2.1 – Ultra- or Super-Short Baseline Acoustic System
The principle of position measurement involves communication at hydroacoustic frequencies between a hull-mounted transducer and one or more seabed-located transponders. The ultra- or super-short baseline (SSBL) principle means that the measurement of the solid angle at the transducer is over a very short baseline (the transducer head).
Sketch 4.1 SSBL principles
An interrogating pulse is transmitted from the transducer. This pulse is received by the transponder on the seabed, which is triggered to reply. The transmitted reply is received at the transducer. The transmit/receive time delay is proportional to the slant and range. So range and direction are determined. The angles and range define the position of the ship relative to that of the transponder. The measured angles must be compensated for values of roll and pitch.
The vessel must deploy at least one battery-powered transponder. They can be deployed by downline from the vessel, by an ROV or simply dropped overboard.
The performance of an acoustic system is often limited by acoustic conditions in the water. Noise from vessel thrusters and other sources, aeration and turbulence12, 13 will all be detrimental to efficient acoustic positioning. Thus the limits of the system are ill-defined. In addition, layering can cause errors, especially when the horizontal displacement from the vessel is large.
Acoustic systems are supplied by a number of manufacturers, notably Kongsberg Simrad, Sonardyne and Nautronix. All use frequencies in the 20-30 kHz band. Some transponders are compatible with more than one supplier’s equipment.
The Smartest Way to Learn: Download Your 35-Part Comprehensive PDF Study Kit and Ace Your DPO Assessments Today!
1.400,00₺Original price was: 1.400,00₺.450,00₺Current price is: 450,00₺.
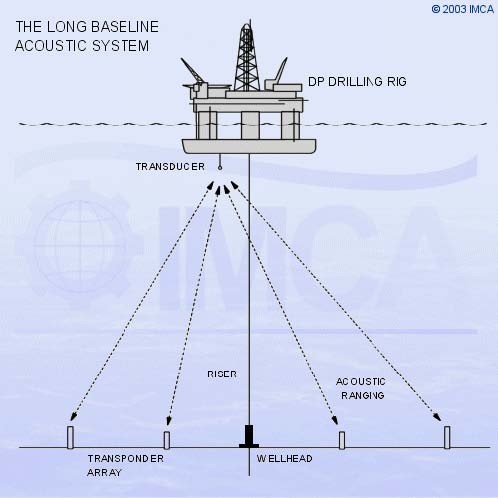
In deepwater locations, where the accuracy of the other types degrades, the long baseline (LBL) becomes more appropriate. LBL systems are in extensive use in drilling operations in deep water areas (>1,000m).
Sketch 4.2 LBL system
The long baseline system uses an array of three or more transponders laid on the seabed in the vicinity of the worksite. Typically the array will form a pentagon (5 transponders) on the seabed, with the drillship at the centre above. One transducer upon the vessel interrogates the transponder array, but instead of measuring range and angular information, ranges only are measured, because the baseline distances have already been calibrated (distances between transponders). Position reference is obtained from range-range geometry from the transponder locations. Calibration is done by allowing each transponder to interrogate all the others in the array, in turn. If, at the same time, the vessel has a DGPS or other geographically-referenced system, then the transponder array may also be geographically calibrated. Accuracy is of the order of a few metres, but the update rate can be slow in deep water because the speed of sound in sea water is about 1,500 m/sec.
4.2.3 – Short Baseline System
A short baseline is like a long baseline system, except that there is an array of transducers (hydrophones), spread along the underside of the DP vessel and the baseline(s) are the distances between them. Thus the accuracy can be better than the ultra- or super-short baseline type of system and work with one transponder or beacon, but it still relies on vessel motion corrections. Some vessels have as many as eight hull penetrations for tubes or poles on which the hydrophones are deployed.
4.3 – Taut Wire Position Reference
A taut wire is a useful position reference, particularly when the vessel may spend long periods in a static location and the water depth is limited. The commonest consists of a crane assembly on deck, usually mounted at the side of the vessel and a depressor weight on a wire lowered by a constant-tension winch. At the end of the crane boom angle sensors detect the angle of the wire. The weight is lowered to the seabed and the winch switched to constant tension, or ‘mooring’ mode. From then on, the winch operates to maintain a constant tension on the wire and hence to detect the movements of the vessel. The length of wire deployed, together with the angle of the wire, defines the position of the sensor head with reference to the depressor weight once the vertical distance from the sheave of the crane boom to the seabed is known. This is measured on deployment. These angles are corrected at the taut wire or by the DP control system for vessel inclinations (roll and pitch angles and motion).
Vertical taut wire systems have limitations on wire angle because of the increasing risk of dragging the weight as angles increase. A typical maximum wire angle is 20 degrees, at which point the DP system will initiate a warning. Some vessels also have horizontal or surface taut wires that can be used when close to a fixed structure or vessel from which a position must be maintained. The principle of operation is the same, but a secure fixing point is required rather than a weight.
Sketch 4.3 – Taut Wire Principles
4.4 – The DGPS Position Reference System
DGPS has become the most commonly-used position reference for DP operations14, 15. The US Department of Defense (DoD) Global Positioning System (GPS) is in widespread general use, with typical accuracies available from the GPS Standard Positioning Service (SPS – civilian access) of 20m (68% RMS or 1 sigma). Prior to May 2000 the DoD applied a further downgrading known as ‘selective availability’ (SA), which reduced SPS accuracy to values around 100m. SA has been switched off, but the DoD reserves the right to re-apply it. Even without SA, GPS accuracy is not adequate for DP purposes.
In order to improve GPS accuracy to levels useful for DP, differential corrections are applied to GPS data. This is done by establishing reference stations at known points on the WGS 84 spheroid (the working spheroid of the GPS system). The pseudo ranges derived by the receiver are compared with those computed from the known locations of the satellites and reference station, and a Pseudo-Range Correction (PRC) derived for each satellite. These corrections are then included in a telemetry message sent to the ship’s receiver by a data link. The receiver then applies the PRCs to the observed pseudo ranges to compute a differentially corrected position.
Differential GPS systems are provided on-board by a service provider. The provider maintains and operates a network of reference stations worldwide and will install receiving equipment on-board to access the services.
4.4.1 – Network DGPS
Most DGPS services accept multiple differential inputs obtained from an array of reference stations widely separated. Generally, network DGPS systems provide greater stability and accuracy, and remove more of the ionospheric error than obtainable from a single reference station. Network systems are more comprehensively monitored at the Hub, or control stations, where user information or warning data may be generated and sent out.
Sketch 4.4 – Network DGPS configuration
The choice of which link to hire or purchase must be made based on the vessel’s expected work areas. If a vessel is expected to be working near fixed platforms, a local HF connection can be best. For floating production, storage and offloading (FPSO) vessels, a local UHF link and relative GPS solution can be the best arrangement.
The accuracy obtainable from DGPS systems is in the area of 1-3m dependent upon the distances to the reference stations, ionospheric conditions, and the constellation of satellites available. DGPS tends to be less reliable in close proximity to large structures (ie. platforms) due to interference to satellite and differential signals. DGPS performance near the magnetic equator has suffered due to scintillation (sun spot activity causing ionospheric disturbances). This reached a peak in 2001 with the maximum of the 11-year sunspot cycle.
4.4.2 – Relative GPS
Some DP operations require the positioning of a vessel relative to a moving structure. An example of this is the operation of a DP shuttle tanker loading via a bow loading hose from the stern of an FPSO. The FPSO may be turret-moored, so it can weathervane. The stern of the FPSO describes the arc of a circle, as well as surge sway and yaw motions, providing a complex positioning problem for the shuttle tanker.
Sketch 4.5 – Relative GPS
An Artemis20 and a DARPS system (Differential, Absolute and Relative Positioning System) are configured to handle this problem. For the measurement of relative position by GPS, differential corrections are not needed, as the errors induced are the same for the shuttle tanker as they are for the FPSO. A DARPS transmitter on the FPSO sends the received GPS data to the UHF receiver aboard the shuttle tanker. A computer aboard the shuttle tanker then calculates a range/bearing from the FPSO’s stern, which is put in to the DP control system as position reference in the same way as Artemis.
4.4.3 – The GLONASS system
GLONASS (the Global Navigation Satellite System11) is the Russian counterpart to the American GPS, being similar in design and operation. The system was initiated with the first satellite launches in 1982, and by 1996, 24 operational satellites were in orbit. However, this number has not been maintained and the number available has, at times, been inadequate for good positioning.
The principles and practice of position determination with GLONASS are identical to that of GPS, using pseudo-range measurement from time and ephemeris data transmitted from the satellites.
The higher orbital inclination of GLONASS satellites (65°), compared to the GPS constellation (55°), results in better satellite availability in higher latitudes. The limited satellite availability precludes the use of GLONASS as a continuous position reference for DP. A number of combined GPS/GLONASS receivers are available. These have the effect of increasing the number of usable satellites within view of the observer.
4.5 – Laser-Based Position Reference
Two laser DP position references are in use -Fanbeam and CyScan21.
Both systems lock onto a single target and/or a number of targets on the structure, from which position must be maintained.Light pulses are sent and received so that range and bearing can be measured.
Ranges vary according to weather conditions, when the systems will be affected by reduced optical visibility.

")